



Общие определения
Поиск домашнего положения (хоуминг, базирование) - это автоматическая процедура поиска базовой точки станка, по которой определяются границы рабочего поля. Для работы процедуры на станке должны быть установлены концевые датчики. В результате выполнения процедуры происходит установка машинных координат станка (обычно в нулевые значения).
Контроллеры Инектра работают только с датчиками NPN-типа, как нормально разомкнутыми, так и нормально замкнутыми. При этом датчики могут быть как индуктивные, так и механические. Как правильно подключать датчики, смотрите в документации на Ваш контроллер и в типовой схеме подключения.
Важно. Контроллер не запоминает машинные координаты после выключения питания, поэтому при следующем включении они обнуляются. Процедура автоматического поиска домашнего положения позволяет быстро восстановить машинные координаты и начать работу.
Важно. Для работы функции автоматического восстановления УП после сбоя по питанию обязательно должен быть настроен хоуминг - без него работа функции невозможна!
Принцип работы и настройка хоуминга
Процедура работает следующим образом. Сначала на высокой скорости (скорости поиска) выполняется быстрый поиск датчиков. Как только датчик достигнут, станок останавливается и делает откат назад (на расстояние отката), после чего запускается второй этап более точного поиска на малой скорости (скорости точного позиционирования). По достижении датчика снова выполняется откат назад, и процедура завершается. И так для всех осей, для которых настроено выполнение хоуминга.
Процедура может выполняться как последовательно от одной оси к другой, одновременно по всем осям, так и в любом настроенном оператором порядке. Порядок выполнения процедуры задается через меню Станок-Конфигурация-Поиск домашнего положения.
Проверка работы концевых датчиков
Перед тем, как первый раз запустить процедуру поиска домашнего положения, необходимо правильно подключить и настроить концевые датчики: датчик оси X должен быть подключен ко входу XLIM, датчики оси Y (или один) должны быть подключены к Y1LIM и Y2LIM (или YLIM) и т.д.
Через меню Станок-Конфигуарция-Входы/Выходы необходимо правильно настроить тип датчиков: NO (нормально открытый) или NC (нормально закрытый).
Важно. Датчики, подключенные для автовыравнивания по обоим краям портала, обязательно должны быть одного типа!
Когда всё подключено и настроено, проверяем, что контроллер правильно детектирует состояние каждого датчика. Для этого выполняем следующую последовательность действий.
- Отъезжаем по всем осям от датчиков (через панель РУЧНОЕ ПЕРЕМЕЩЕНИЕ), чтобы они точно были не активны, и проверяем, что в окне визуализации слева вверху нет надписи Выводы: .... Если надпись есть, то для перечисленных в ней осей проверяем правильность настройки типа соответствующего входа в меню Станок-Конфигуарция-Входы/Выходы. Если настройки верные, а сигнал горит, то необходимо проверить правильность подключения и исправность соответствующих датчиков. Важно: если к какому-либо входу датчик не подключен, тип этого входа должен быть настроен как NO!
- Последовательно по очереди замыкаем каждый датчик (подносим металл к индуктивному или руками замыкаем механический) и проверяем по надписи Выводы: ... в окне визуализации, что контроллер отобразил правильный сигнал: когда замкнули датчик оси X, появляется надпись Выводы: X, когда замкнули датчик Y1 - надпись Выводы: Y1 и т.д.
Проверка работы и запуск процедуры
Важно. Перед запуском процедуры поиска домашнего положения необходимо выполнить следующие действия.
- Откалибровать все оси, чтобы программные и реальные перемещения совпадали (правильно настроить разрешения осей через меню Станок-Конфигурация-Шаговые двигатели).
- Правильно задать размеры рабочего поля через меню Станок-Конфигурация-Рабочее поле.
- Включить процедуру, активировав галочку "Включить" в меню Станок-Конфигурация-Поиск домашнего положения.
- Включить галочку "Установить машинную координату на датчике" в меню Станок-Конфигурация-Поиск домашнего положения. При необходимости Вы можете настроить отличные от нуля машинные координаты по каждой оси в домашнем положении.
- Выставив соответствующие галочки в секции "Порядок выполнения процедуры", настройте, в каком порядке будет выполняться поиск домашней позиции по осям.
- Для каждой оси при необходимости настройте скорость поиска, скорость точного позиционирования и расстояние отката.
Порядок проверки работы процедуры хоуминга следующий.
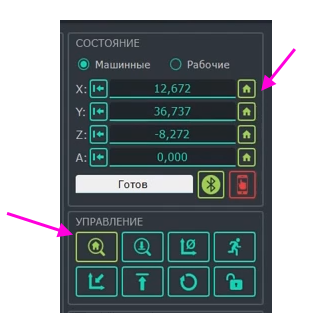
- После того, как все датчики настроены, проверяем поиск домашнего положения по каждой оси в отдельности. Для этого через панель СОСТОЯНИЕ в машинных координатах нажимаем соответствующую кнопку. Для работы этой функции в меню Станок-Конфигурация-Поиск домашнего положения должна быть включена галочка "Разрешить команду для отдельной оси $H<буква оси>".
- Если станок по выбранной оси движется в противоположную сторону от датчика, необходимо в меню Станок-Конфигурация-Поиск домашнего положения изменить значения галочки "Инвертировать направление поиска" для соответствующей оси.
- После того, как по всем осям проверка процедуры прошла успешно, запускаем общий хоуминг по кнопке Домой на панели УПРАВЛЕНИЕ.
Ручная установка домашнего положения
Если на Вашем станке не установлены концевые датчики, Вам может потребоваться иметь возможность вручную устанавливать домашнее положение в определенной позиции. Для этого необходимо сделать следующие настройки в меню Станок-Конфигурация-Поиск домашнего положения.
- Включить галочку "Установить машинную координату на датчике".
- Настроить ниже машинные координаты по каждой оси в домашнем положении - по умолчанию нули.
- Включить галочку "Разрешать вручную".
- Снять все галочки в секции "Порядок выполнения процедуры".
Теперь, чтобы установить домашнее положение, с помощью кнопок ручного перемещения перемещаемся в нужную точку и нажимаем кнопку Домой на панели УПРАВЛЕНИЕ.
Индикация установленного домашнего положения станка
При успешном выполнении процедуры поиска домашнего положения, независимо от того, автоматически по датчикам или вручную, кнопка Домой на панели УПРАВЛЕНИЕ и кнопки Домой по каждой оси на панели СОСТОЯНИЕ подсвечиваются зеленым цветом.
Важно. Перед началом работы на станке настоятельно рекомендуется выполнить процедуру поиска домашнего положения.
